Hierarchical Deformation of Locally Rigid Meshes
A method of applying deformations based on constraints to vertices in a high-resolution mesh. The deformation is calculated quickly by deforming a low-resolution base mesh, and adding details that match the deformation.
 download preprint
download preprint
BibTeX
@article{Manson:2011:HDLRM,
author = {Josiah Manson and
Scott Schaefer},
title = {Hierarchical Deformation of Locally Rigid Meshes},
journal = {Computer Graphics Forum},
volume = {30},
number = {8},
year = {2011},
pages = {2387--2396},
}
Abstract
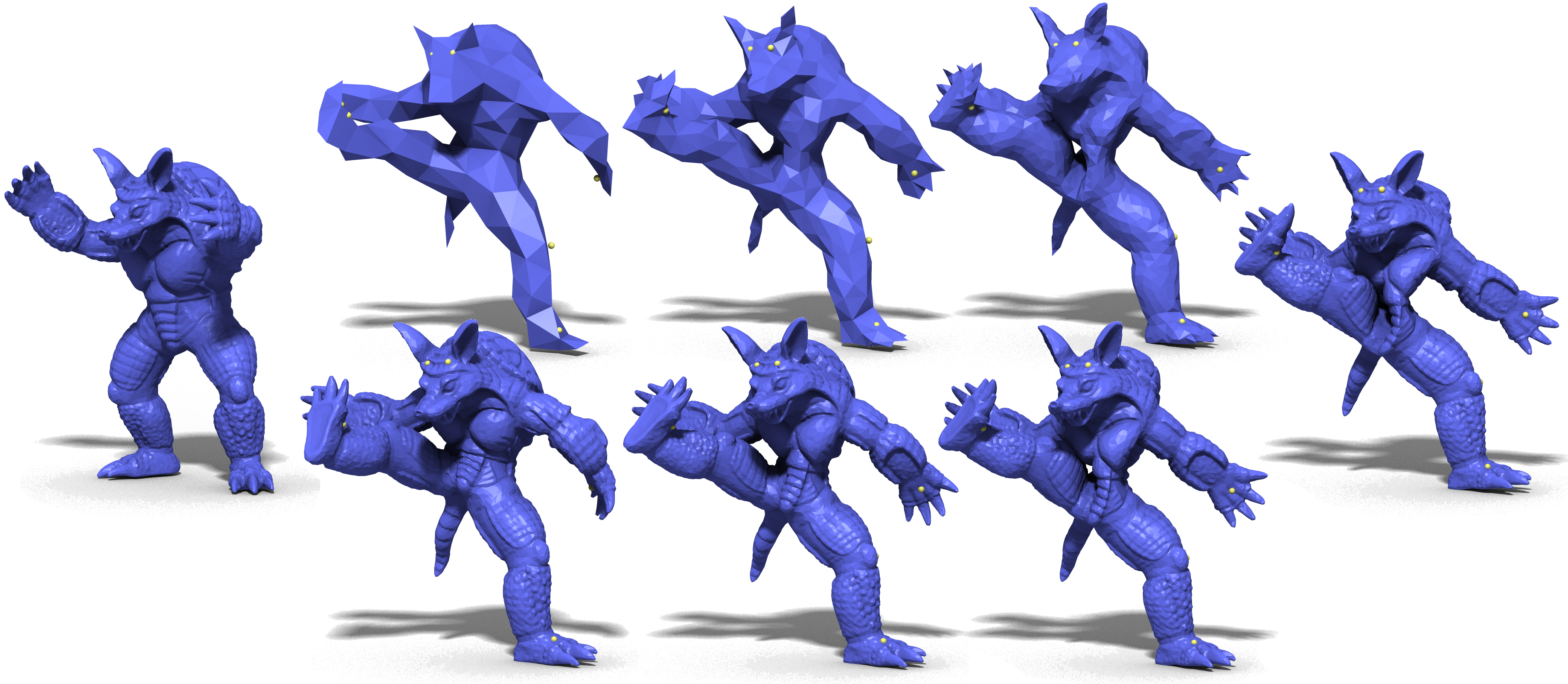
We propose a method for calculating deformations of models by deforming a low-resolution mesh and adding details while ensuring that the details we add satisfy a set of constraints. Our method builds a low-resolution representation of a mesh by using edge collapses and performs an as-rigid-as-possible deformation on the simplified mesh. We then add back details by reversing edge-collapses so that the shape of the mesh is locally preserved. While adding details, we deform the mesh to match the predicted positions of constraints so that constraints on the full-resolution mesh are met. Our method operates on meshes with arbitrary triangulations, satisfies constraints over the full-resolution mesh, and converges quickly.
Supplemental
 multiscale_SPM2013.pptx
multiscale_SPM2013.pptx
The slides presented at Solid and Physical Modelling 2013. The movies are the same as from EG 2012.
 eg2012-hierarchical.zip
eg2012-hierarchical.zip
The slides and movies used for the presentation at Eurographics 2012.
 local_rigid.avi
local_rigid.avi
A movie demonstrating the method described in the paper.
License
The images, executables, and code supplied are from the web page http://josiahmanson.com. These materials are free to use for non-commercial purposes. Any works that use materials from this web page should acknowledge Josiah Manson and the paper Hierarchical Deformation of Locally Rigid Meshes. For commercial use, please contact Josiah Manson (josiahmanson@gmail.com).